(Prêmio Pacau Magalhães-Motta, ano de 2004, 1º lugar)
RESUMO
Este trabalho traz como proposta o desenvolvimento de técnicas de emprego do sistema FLIR ("Forward Looking Infra-Red") na região amazônica, com o objetivo de proporcionar meios adequados de utilização do mesmo para as futuras Unidades operadoras da aeronave A-29B.
Começa demonstrando a origem dos sistemas imageadores térmicos, sua base teórica e suas primeiras aplicações, e evidenciando as características inerentes às câmeras infravermelhas.
Em seguida, descreve as particularidades do sistema que equipa a aeronave A-29B, delineando seus componentes, seus modos de aplicação e suas limitações.
Após, esclarece a situação atual da Aviação de Caça no que diz respeito à aplicação de sensores em apoio às missões a ela atribuídas, destacando os obstáculos que se apresentam para as Unidades que operam na Amazônia.
Por fim, propõe formas de utilização do sistema FLIR nesta área do país, a fim de que se possa explorar todo o seu potencial em proveito das atividades aéreas noturnas.
CAPÍTULO 1
CONSIDERAÇÕES INICIAIS
Durante a operação Tempestade no Deserto conduzida pelas forças de coalizão contra o exército iraquiano no ano de 1992, a maior parte das missões de interdição foi realizada durante o período noturno. Isto ocorreu, principalmente, por dois fatores.
O primeiro tinha origem no fato de que as tropas iraquianas organizavam-se à noite. Tal tática, já amplamente utilizada em outros conflitos, tinha como objetivo aproveitar a escuridão para camuflar movimentações de tropas e de suprimentos.
O segundo tinha como base a incorporação de novas tecnologias às plataformas de guerra da coalizão, principalmente às norte-americanas. Novos sensores permitiam detectar e visualizar alvos independentemente das condições de visibilidade. Um destes sensores era o FLIR, equipamento que permitia identificar alvos baseando-se nas ondas infravermelhas emitidas pelos mesmos.
O Brasil, em atenção às especificações do projeto SIVAM (Sistema de Vigilância da Amazônia), adquiriu recentemente aeronaves A-29B que, como as plataformas da coalizão na Guerra do Golfo, possuem sensores infravermelhos. Cabe, agora, à Aviação de Caça determinar as formas mais adequadas de emprego de tão avançados meios.
Sendo a região amazônica o principal palco de atuação dessas aeronaves, o objetivo deste trabalho constitui-se, então, na proposição de técnicas de utilização do equipamento FLIR nesta área do país, de maneira que possibilite o completo aproveitamento de seus recursos.
Tendo isso em vista, faz-se necessário analisar a origem e as características dos sistemas imageadores térmicos, a fim de que se possa compreender o seu funcionamento e as suas peculiaridades.
CAPÍTULO 2
SISTEMA IMAGEADOR TÉRMICO
2.1 ORIGEM
Termografia é a técnica de se medir a temperatura de um determinado objeto na forma gráfica ou visível a olho nu, através da radiação infravermelha que todos os corpos acima do zero absoluto (-273,15o C) irradiam. Todo o fundamento da termografia se baseia na teoria de que todos os corpos que possuem temperatura acima do zero absoluto (zero Kelvin) emitem radiação eletromagnética.
Esta teoria foi comprovada através de experimentos por Josef Stefan em 1879. Este cientista também comprovou que o total da energia irradiada por um corpo é proporcional à quarta potência de sua temperatura absoluta.
Em 1884 Ludwig Boltzmann aprimorou os estudos de Josef Stefan e desenvolveu a chamada lei de Stefan-Boltzmann:
|
W ="sigma".T4 |
|---|
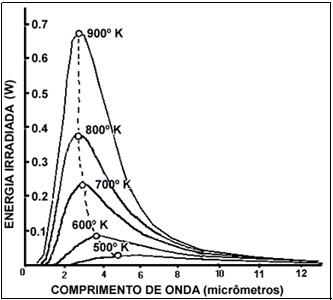
Figura no 2-1 Curvas de Planck
Este gráfico (Figura 2-1), conhecido também como curvas de Planck, mostra que o comprimento de onda eletromagnética no qual ocorre irradiação máxima de energia é função da temperatura absoluta do objeto analisado.
Esta relação foi descrita por Wilheim Wien como:
|
"lambda" máx = 2898 / T |
|---|
Apesar de já se conhecer, desde o inicio do século 20, toda a teoria que relacionava a irradiação de infravermelho com a temperatura, os primeiros sistemas infravermelhos só foram desenvolvidos na década de 40 em função da Segunda Guerra Mundial.
Utilizando os princípios do infravermelho, os alemães desenvolveram o primeiro dispositivo de visão noturna, que foi utilizado pelas forças nazistas em combates na frente russa. Os americanos paralelamente construíram o sistema de visão dianteira por infravermelho ou FLIR (Forward Looking Infrared). Este equipamento ficava acoplado na frente das aeronaves e fornecia um mapa térmico que permitia a identificação de veículos e tropas.
2.2 CARACTERÍSTICAS
Uma vez que o olho humano não consegue perceber ondas eletromagnéticas na faixa do infravermelho, torna-se necessário algum tipo de dispositivo que converta as radiações infravermelhas em ondas eletromagnéticas visíveis.Em termos práticos, isso é feito com uma câmera especial cujo elemento sensor eletrônico é sensível a uma determinada faixa de radiação infravermelha. Essa câmera além de registrar a radiação emitida pelo alvo, a transforma em uma imagem visível ao olho humano.
|
1) Espelho primário |
6) Detector de índio/antimônio |
|---|---|
|
2) Espelho oscilatório de varredura horiz. |
7) Resfriador do detector |
|
3) Espelho plano |
8) Motor de acionamento do prisma rotativo |
|
4) Prisma de varredura horizontal |
9) Motor de acionamento do espelho oscilante |
|
5) Lentes de germânio |
Figura no 2-2 Estrutura básica de uma câmera termográfica
Assim podemos ter "imagens térmicas" de todos os objetos dentro da faixa de alcance da câmera.
Normalmente, esses sensores devem ser resfriados para garantir um tipo de "câmara escura", a fim de que as temperaturas medidas sejam confiáveis. A figura 2-2 apresenta a estrutura básica de uma típica câmera infravermelha.
As câmeras termográficas captam, através de suas lentes especiais, as irradiações infravermelhas que são emitidas pelo objeto analisado e as decodificam através de um algoritmo, em tons mais escuros para as superfícies mais frias e em tons mais claros para as superfícies mais aquecidas (Figura 2-3).

|
2-3a Termograma |
------ |
2-3b Foto (comum) |
|---|
Figura no 2-3 Comparação entre foto e termograma
Nas câmeras mais modernas, inclusive, o usuário pode criar um código arbitrário de cores para uma melhor apresentação. Durante uma medição termográfica, para se garantir uma maior confiabilidade da leitura, é importante conhecer a emissividade do material inspecionado. A emissividade é a capacidade que um corpo tem de emitir ondas infravermelhas.
Esta característica está relacionada com a composição química da superfície do material e com a textura do corpo em questão. Um material metálico que possui superfície polida irá apresentar uma baixa emissividade e conseqüentemente emitirá uma taxa pequena de infravermelho. Em contrapartida materiais com superfícies rugosas e opacas apresentam alta emissividade e elevada taxa de irradiação infravermelha para o ambiente. Outras variáveis como o ângulo de medição e a presença de gases no ambiente também podem influenciar na leitura da temperatura.
Conhecendo a origem e as características dos sistemas imageadores térmicos, será possível descrever, agora, o equipamento que equipa as aeronaves A-29B.
CAPÍTULO 3
SISTEMA IMAGEADOR TÉRMICO DA AERONAVE A-29B
O equipamento AN/AAQ-22 da empresa norte-americana FSI ("FLIR Systems Incorporated") foi o escolhido para equipar as aeronaves A-29B brasileiras. A câmera é operada da cabine de pilotagem traseira, através do painel de controle (instalado no console direito) e de uma página dedicada no CMFD(2).
3.1 COMPONENTES
O sistema é composto pelo painel de controle, pela unidade eletrônica central e pela torre do sensor. O painel de controle está instalado no console direito do posto traseiro, fornecendo todos os comandos necessários para a operação do FLIR. O mesmo possui um “joystick” para a movimentação da torre em elevação e em azimute.
Por sua vez, a unidade eletrônica central está instalada no compartimento eletrônico e contém todos os circuitos necessários para controlar as interfaces, a conversão de energia elétrica, a função auto-rastreamento (autotracking), o processamento de vídeo nas duas saídas, todos os modos e funções do equipamento, a geração de simbologia para a modalidade de gráficos de vídeo e a ativação das funções. Deve-se ressaltar que esta unidade não requer nenhum sistema de refrigeração.

Figura no 3-1 Sensor e torre do FLIR (TFLIR)
Finalmente, a torre do sensor (figura 3-1) capta imagens visíveis e térmicas, as processa e as envia à unidade eletrônica central. Possui uma varredura de trezentos e sessenta graus em azimute e de mais trinta a menos cento e vinte graus em elevação. Também tem como função a estabilização da linha de visada, a informação da posição desta e o gerenciamento térmico. A torre está instalada na barriga da aeronave em uma unidade de desconexão rápida e não requer sistema de refrigeração, tanto em solo como em vôo. O sensor opera numa banda espectral de oito a doze micrometros.
3.2 MODOS DE OPERAÇÃO
O equipamento possui os seguintes modos de operação: “cage”, “point”, “stow”, “autoscan”, “search and track”, “heading hold”, “inertial pointing” e “fault isolation test”.
No modo “inertial pointing”, a torre é manualmente controlada pelo comando do operador sobre os controles. Se nenhum comando for gerado, os giros da torre manterão a mesma em sua elevação e rumo inercial, ou seja, estabilizada contra movimentos de arfagem, rolamento e guinada.
No modo “point”, a torre é apontada para uma posição selecionada pelo operador e transferida para a unidade eletrônica. A elevação e a posição do azimute da linha de visada da torre são, então, continuamente informadas ao operador.
No modo “search and track”, a torre é apontada para uma posição selecionada pelo operador e transferida para a unidade eletrônica. A torre começa então um movimento de varredura em azimute. Se um possível alvo (ponto quente) for detectado e a função “autolock” estiver ativada, o alvo será rastreado automaticamente. No modo “autoscan” a torre executa uma varredura em azimute em relação à linha central da aeronave ou outra posição “cage” com ângulo e taxa de varredura ajustáveis. Se o “autolock” estiver ativado, o rastreamento automático perseguirá qualquer alvo que for encontrado.
No modo “stow”, a torre é comandada para uma posição onde as janelas (lentes) ópticas são protegidas do ambiente (poeira ou detritos jogados pela roda do trem de aterragem durante o pouso e a decolagem). No modo “heading hold”, a torre é controlada manualmente pelos comandos gerados a partir de um dispositivo transdutor de pressão. Se nenhum comando for gerado a partir do transdutor, a torre manterá fixa a sua posição (atitude e elevação) em relação à fuselagem.
Por fim, no modo “fault isolation test”, o FLIR executa testes para detectar falhas do sistema e relata os resultados.
Após analisar o sistema imageador térmico instalado na aeronave A-29B, veremos qual a situação atual da aviação de caça com relação à utilização de sensores desta natureza em missões a ela atribuídas
CAPÍTULO 4
SITUAÇÃO ATUAL NA AVIAÇÃO DE CAÇA
Das quatro Tarefas Operacionais estabelecidas na Doutrina Básica da Força Aérea Brasileira (DMA 1-1), duas são consideradas Tarefas Básicas das Operações Aerotáticas: Superioridade Aérea e Interdição. A Tarefa de Superioridade Aérea consiste na destruição ou neutralização do potencial aéreo inimigo, enquanto que a Tarefa de Interdição consiste na destruição ou neutralização das fontes de poder inimigo, seus suprimentos, suas forças e suas estruturas de apoio. E, uma vez que a Aviação de Caça forma o coração das forças aerotáticas, cabe a ela o desempenho das missões referentes às Tarefas acima citadas.
A maior parte destas missões, contudo, requer uma identificação positiva do objetivo antes que se prossiga com a destruição ou neutralização do mesmo. Para isso o piloto emprega os meios a sua disposição, a fim de que reconheça eficazmente o alvo.
Atualmente, entretanto, poucas são as Unidades de Caça que possuem a capacidade de realizar um reconhecimento apurado, ou seja, diferente do visual. Somente as Unidades operadoras de F-5 e F-103 contam com o auxílio do radar. Estes sensores, porém, foram desenvolvidos para o emprego ar-ar, encontrando-se, ainda, defasados em relação às versões mais modernas.
A situação das Unidades que operam na região amazônica é ainda mais crítica. Além da defasagem tecnológica de seus equipamentos, estas Unidades vêem-se obrigadas a operar em um ambiente desfavorável, caracterizado por precipitações intensas e extensas coberturas de árvores. Estes fatores facilitam a camuflagem dos objetivos, dificultando a visualização destes pelo piloto.
Com a entrada em serviço das aeronaves A-29, esta realidade sofrerá uma mudança. As missões, que, no presente momento, são realizadas, em sua maior parte, no período diurno, poderão ser conduzidas à noite. Tráfegos ilícitos voando a baixa altura e alvos escondidos debaixo da copa das árvores serão identificados termicamente através da emissão de calor de suas estruturas.
A utilização deste aparato, contudo, demanda bastante treinamento. E, para que se possa empregá-lo adequadamente, devem, primeiramente, ser estabelecidos padrões de aplicação. Por conseguinte, veremos, a seguir, algumas sugestões que preencham esta lacuna.
CAPÍTULO 5
SUGESTÕES PARA APLICAÇÃO
As principais e mais específicas missões que as Unidades de Caça da Amazônia desempenham são as de interceptação de tráfegos de baixa performance e as de reconhecimento armado de fronteiras e de rios. E, já que cada uma delas possui suas particularidades, faz-se necessário distinguir as possíveis aplicações.
5.1 INTERCEPTAÇÃO NOTURNA
Para este tipo de missão, o FLIR poderia ser empregado de duas formas diferentes: como meio de rastreamento na parte final de uma interceptação ou como instrumento de varredura em caso de perda de contato radar. No primeiro caso, o piloto seguiria as instruções do COAM (Controlador de Operações Aéreas Militares) normalmente até ser comandada a curva de ataque(3) . Neste momento, o tripulante da nacele traseira (operador do sistema FLIR) selecionaria o modo “autoscan” do equipamento, com alta razão de varredura e angulação coerente com o posicionamento do objetivo, juntamente com a função “autolock”. Ao ser localizado o alvo, este mesmo tripulante deveria orientar o piloto até o contato visual ou aquisição através dos óculos de visão noturna. A partir daí, então, prosseguir-se-iam com as medidas de policiamento do espaço aéreo necessárias.
Este procedimento seria importante no caso de a aeronave interceptada estar voando com as luzes de navegação apagadas, associado a precárias condições de visibilidade.
No segundo caso, o interceptador manteria órbita no setor mais provável de permanência do tráfego. O operador do FLIR selecionaria o modo “search and track” e a função “autoscan”, posicionando o sensor na última direção informada pelo controlador. Com a identificação do alvo, o operador procederia, finalmente, como no primeiro caso.
Esta aplicação seria oportuna em caso de interceptação nos limites do horizonte radar ou em caso de falha do mesmo durante a missão.
5.2 RECONHECIMENTO ARMADO NOTURNO
Este tipo de missão deveria ser executado em elemento, sendo uma das aeronaves, obrigatoriamente, um A-29B. A aeronave equipada com o FLIR seria responsável pela navegação, pela identificação e pela descrição dos alvos, enquanto a outra assumiria os ataques.
O dispositivo (figura 5-1) seria semelhante ao de procura a baixa altura diurna, com o líder(4) sobre o eixo do reconhecimento armado e o ala(5) na relativa de sessenta graus a uma distância que lhe permitisse acompanhá-lo. A diferença estaria na altura a ser mantida. Como regra de segurança, o líder manteria mil pés de altura em relação ao terreno. O ala, por sua vez, estaria nivelado na altura do topo do “balsing”(6) da respectiva modalidade: tiro terrestre ou lançamento de foguetes.
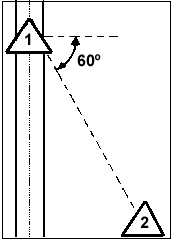
Figura no 5-1 Formatura de "procura" a baixa altura diurna
A partir daí, o operador do sistema FLIR selecionaria o modo “autoscan” com alta taxa de varredura, adotando como direção base o eixo da procura. Ao detectar o objetivo, o operador passaria sua descrição e seu posicionamento via fonia, comandando o mergulho da aeronave atacante. Esta procederia ao emprego do armamento, enquanto o líder curvaria em sua direção. Feito isso, caberia ao ala efetuar o reposicionamento ou inverter as posições na formatura(7) . Para esta segunda opção, o ala teria que estar, também, pilotando um A-29B.
Após a definição das sugestões de técnicas aplicáveis às mais específicas missões atribuídas às Unidades da Amazônia, seguirão as conclusões deste trabalho.
CAPÍTULO 6
CONCLUSÃO
Comprovadamente, é necessário o desenvolvimento de técnicas para a aplicação do sistema FLIR que equipa as aeronaves A-29B recém adquiridas, de forma que se possibilite o aproveitamento completo de seus recursos. Para isso, demonstrou-se, no início deste trabalho, a origem e as características dos imageadores térmicos, destacando-se suas limitações e suas peculiaridades de funcionamento.
No capítulo seguinte, descreveu-se o sistema AN/AAQ-22 que equipa as aeronaves A-29B, detalhando seus componentes e seus modos de operação.
Após isto, expôs-se a crítica situação atual das Unidades de Caça com relação ao emprego de sensores, particularmente os de imageamento térmico, no cumprimento das missões a elas atribuídas. Por fim, foram propostas aplicações para tais sensores na região amazônica, tendo como base as principais tarefas desempenhadas pelas Unidades que operam neste ambiente.
Com isso, fica claro que o objetivo deste trabalho foi alcançado, ou seja, foram propostas eficazmente técnicas que possibilitem o correto emprego dos meios a pouco incorporados à Aviação de Caça. Vislumbram-se, assim, a importância do aprimoramento da doutrina deste tipo de aviação e as possibilidades que se apresentam para os anos vindouros.
Finalizando, deve-se reforçar a idéia de que todos os avanços tecnológicos demandam uma mudança dos procedimentos a eles relacionados, pois de nada vale a aquisição dos equipamentos mais modernos, se não sabemos como operá-los adequadamente.
2o Ten.Av. Paulo Fernando Pereira CALIARI
REFERÊNCIAS BIBLIOGRÁFICAS
1 – BRASIL. Comando da Aeronáutica. Estado-Maior da Aeronáutica. Doutrina Básica da Força Aérea Brasileira. Brasília, 1997. (DMA 1-1).
BRASIL. Comando da Aeronáutica. Terceira Força Aérea. Manual da Aviação de Caça. Brasília, 2003.
EMBRAER. Manual de manutenção da aeronave A-29. [S.l.], 26 mar. 2004.
PIM, Vinicius Brasil. A termografia e suas aplicações. [S.d.]. Disponível em: . Acesso em: 25 jul. 2004.
